Ерекшеліктері мен сипаттамасы
- Основные атрибуты
- Өндіруші
- ЖағдайыЖаңа
- Пайдаланушы сипаттамалары
- ҚаптамаПластикалық қорап
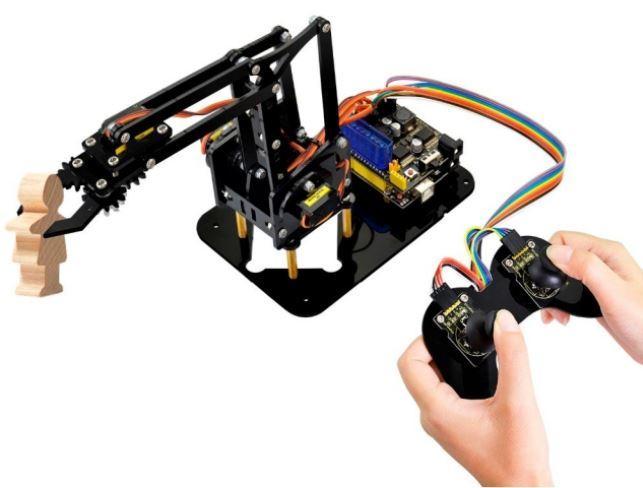
Осы роботтық қолдың негізгі жинағының көмегімен сіз ARDUINO микроконтроллерінің көмегімен басқарылатын механикалық қолды өзіңіз жасай аласыз. Ол 4 сервоның айналу бұрышын басқару үшін UNO R3 және 2 джойстик модульдерін пайдаланады.
Осы 4DOF роботтық қол жинағын жасау кезінде сіз қолды орнату және жөндеу үшін қажет нәрсенің барлығын ала аласыз.
Басқарудың 3 тәсілі бар:
1) Сымды джойстик арқылы басқару (жинаққа кіреді);
2) Телефондағы Bluetooth басқару элементтері (ескертпе: HC-06 Bluetooth модулі қосылмаған, тек Bluetooth сынақ кодын және Android телефон қолданбасын қамтамасыз етіңіз);
3) PS2 джойстикті сымсыз басқару (PS2 джойстик модулі қосылмаған, біз тек сынақ кодын береміз.)
Сіз барлық қажетті ақпаратты Arm жинағынан ала аласыз.
- Толық орнату нұсқаулары
- Arduino-ны кірістен бастайтын егжей-тегжейлі жөндеу әдістері.
- Басқарудың үш тәсілі: Wired JoyStick Control; Телефонның Bluetooth басқаруы; Сымсыз PS2 JoyStick Control.
Keyestudio TB6612FNG қозғалтқышының/сервосының кеңейту тақтасының параметрлері келесідей:
- Кернеу VIN: VIN = Тұрақты ток 7-15 В
- VIN ток: 5А
- Екі жақты шығу 5В: 5В / 3А
- TB6612FNG: VIN тұрақты ток кірісі 7-15В; жетектің орташа тогы 1,2А; ең жоғары ток 3,2А
- PS2 интерфейсі: Sony PS2 қабылдағышымен үйлесімді, оны тікелей кеңейту картасына қосуға болады.
- Өлшемдері: 73 * 53,34 мм
| Нөмір. | Құрамдас бөлігі | Саны | Сурет |
|---|---|---|---|
| 1 | Keyestudio UNO R3 Негізгі тақта | 1 |  |
| 2 | keyestudio TB6612FNG мотор / серво қалқан | 1 |  |
| 3 | MeArm T = 3ММ қара акрил панельдері | 1 |  |
| 4 | MeArm T = 3 мм қара акрил тұтқасы | 1 |  |
| 5 | MeArm Қара ABS цилиндрлік ұстағыш Диаметрі 42 мм | 1 |  |
| 6 | Қара 180 ° сервожетек | 4 |  |
| 7 | Bluetooth-модуль Keyestudio- (HC-06) | 1 | |
| 8 | Keyestudio Джойстик модулі | 2 |  |
| 9 | 3D PS2 Джойстик | 2 |  |
| 10 | Сары және қара тұтқа 3 * 40MM Phillips бұрағыш | 1 | |
| 11 | Қалыңдығы 2 мм мырышталған екі жақты кілт M2 + M3 | 1 | |
| 12 | M3 * 6ММ крест тәрізді бұранда | 12 | |
| 13 | M3 * 10ММ дөңгелек басты бұранда | 22 |  |
| 14 | М3 * 16ММ дөңгелек басты бұранда | 2 | |
| 15 | M3 * 16ММ жалпақ басты бұранда | 2 |  |
| 16 | M3 * 12ММ дөңгелек басты бұранда | 12 |  |
| 17 | Мыс бағанасы М3 * 30 + 5ММ | 4 |  |
| 18 | М3 * 6мм + 6мм мыс бағанасы | 10 |  |
| 19 | M3 Тот баспайтын болаттан жасалған алтыбұрышты гайка | 22 |  |
| 20 | Алты қырлы басты гайка M3 | 24 | |
| 21 | Өздігінен бұрап тұратын бұранда M1.2x5MM Phillips | 8 |  |
| 22 | Өздігінен бұрап тұратын бұранда M2x5MM Phillips | 10 |  |
| 23 | M3 304 Тот баспайтын болаттан жасалған жалпақ шайба 3 * 7 * 0,5 мм | 10 | |
| 24 | Өздігінен бұрап тұратын бұранда M2x8MM Phillips | 2 | |
| 25 | Ерлер мен әйелдер арасындағы секіргіш 10 см | 4 | |
| 26 | әйелден әйелге 50 см секіргіш сым | 10 | |
| 27 | 3 * 100 мм қара кабель байламдары | 1 |
online болды: 14.05

5 лет на Satu.kz
100-ден аз тапсырыс
Сатушы туралы пікірлер
- Сатып алушы27.02.2024Не пришлоТауар болған жоқМаған хабарласқан жоқУәде етілгеннен уақыттан ұзағырақ жіберілді
- Сатып алушы18.11.2023Огромное спасибо за сервис. Доставка на следующий день после заказа. Продавцу Олжасу отдельное спасибо.Жақсы қызмет көрсетуАғымдағы сипаттамаТез байланысқа шықтыЖылдам жібердіСыпайы сатушыАғымдағы бағаТауар қолжетімді болды
- Сатып алушы12.10.2023Ағымдағы сипаттамаАғымдағы баға
- Сатып алушы28.01.2023по 3 разных товара разместил, по факту их нет в наличииТауар болған жоқ
- Сатып алушы10.12.2022Тауар болған жоқ
- Сатып алушы29.12.2021Отличный набор! Всё соответствует фотографиям. Отличный продавец, передали заказ в пятницу, чтобы успеть к Новому Году! За это отдельное спасибо!Жақсы қызмет көрсетуАғымдағы сипаттамаТез байланысқа шықтыЖылдам жібердіСыпайы сатушыАғымдағы бағаТауар қолжетімді болды
- Сатып алушы16.11.2020Вежливый продавец, заказ отправили сразу, все пришло вовремя, товар соответствует. Рекомендую!Жақсы қызмет көрсетуАғымдағы сипаттамаТез байланысқа шықтыЖылдам жібердіАғымдағы бағаТауар қолжетімді болды
- Сатып алушы09.11.2020Жақсы қызмет көрсетуАғымдағы сипаттамаТез байланысқа шықтыЖылдам жібердіАғымдағы бағаТауар қолжетімді болды

4DOF Arduino DIY үшін механикалық роботты қол жинағы
Код: Arduino DIYБар
35 000 ₸
- Satu 50 000₸

- Сіздің тапсырысыңыз

Жеткізу
 Жеткізу Алып кету
Жеткізу Алып кету Курьер арқылы жеткізу (Осы жағдайда тегін)
Курьер арқылы жеткізу (Осы жағдайда тегін)- Пошта арқылы жеткізу (Осы жағдайда тегін)
- Алып кету
- 100000 теңгеден бастап сатып алу кезінде тегін жеткізу (Тегін)
Төлем және кепілдіктер
 Қолма-қол ақшасыз есеп айырысу
Қолма-қол ақшасыз есеп айырысу Қолма-қол ақшамен
Қолма-қол ақшамен
Басқа сатушыларда ұқсас


